Este documento es una guía de diseño para sistemas de medición con RTD, con el objetivo de lograr alta precisión.
Lo que cubre
1) Principio de funcionamiento
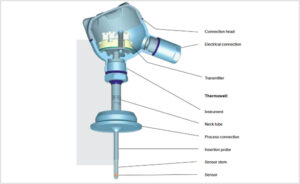
Un RTD mide temperatura mediante un elemento cuya resistencia varía con la temperatura (platinium, níquel, cobre, etc.). Para una medición precisa, se aplica una corriente de excitación o un voltaje constante, se mide la resistencia, y luego se convierte a temperatura mediante ecuaciones o tablas.
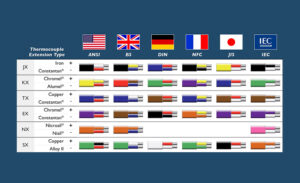
2) Efecto de los cables / leads
En conexiones de 2 hilos (“2‑wire”), la resistencia de los cables se suma a la del sensor, lo que introduce error.
En configuración de 3 hilos, se puede compensar parcialmente la resistencia de los cables, suponiendo que las longitudes y resistencias de los cables sean iguales.
En 4 hilos (o “4‑wire” / Kelvin), se elimina prácticamente el efecto de los cables, porque se miden voltajes en los extremos del sensor con cables separados para corriente y para medición. Esto mejora bastante la precisión.
3) Selección de la corriente (o voltaje) de excitación
En conexiones de 2 hilos (“2‑wire”), la resistencia de los cables se suma a la del sensor, lo que introduce error.
En configuración de 3 hilos, se puede compensar parcialmente la resistencia de los cables, suponiendo que las longitudes y resistencias de los cables sean iguales.
En 4 hilos (o “4‑wire” / Kelvin), se elimina prácticamente el efecto de los cables, porque se miden voltajes en los extremos del sensor con cables separados para corriente y para medición. Esto mejora bastante la precisión.
4) Conversión resistencia → temperatura
Existen ecuaciones (por ej. la ecuación de Callendar‑van Dusen) o tablas de calibración.
La no-linealidad puede introducir errores si no se usa una buena aproximación.
5) Normas de tolerancia / clases de precisión
El estándar IEC 60751 define clases para RTDs de platino (Pt100, etc.). Ejemplos: Clase B, Clase A, Clase AA. Cada clase define un límite de tolerancia en grados centígrados que depende de la temperatura.
Por ejemplo, Clase A puede tener ±(0.15 + 0.002·|T|) °C como tolerancia. Clase B es más laxa.
6) Fuentes de error adicionales
Ruido eléctrico, interferencias electromagnéticas.
Deriva con el tiempo (drift), estabilidad del material del sensor.
Efecto de autocalentamiento si la corriente es alta.
Errores en la conversión R→T si las constantes usadas o la curva calibrada no son muy buenas.
Errores en la instalación física, contacto térmico, cambios de temperatura no uniformes, etc.
7) Ejemplos prácticos
En el mismo artículo se muestran ejemplos de medición, cómo configurar para minimizar errores, y cuánto error residual se puede esperar si todo está bien diseñado.
Resumen de lo más importante sobre precisión de los RTD
- Un RTD bien diseñado y calibrado puede tener precisión de décimas de grado (por ejemplo ±0.1‑0.2 °C) en rangos moderados.
- La clase del RTD (A, B, AA) define cuánto puede desviarse de la temperatura real, y ese desfase crece con la temperatura.
- La configuración de cableado (2, 3, 4 hilos) tiene un impacto grande: usar 4 hilos da los mejores resultados porque elimina errores debidos a la resistencia de los cables.
- Hay que controlar la corriente de excitación para evitar autocalentamiento, seleccionar componentes estables (resistencias de referencia, convertidores A/D con bajo ruido), y aplicar calibración donde sea necesario.
- Incluso con todo bien hecho, siempre hay un error residual que depende del sensor, del sistema de lectura, del ambiente, etc.